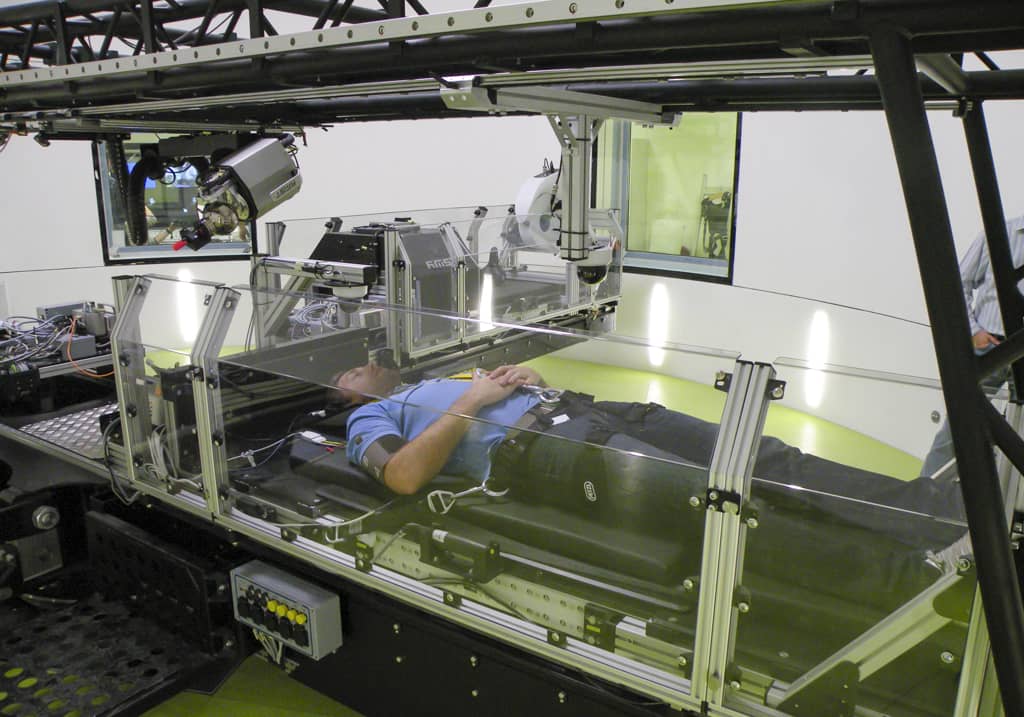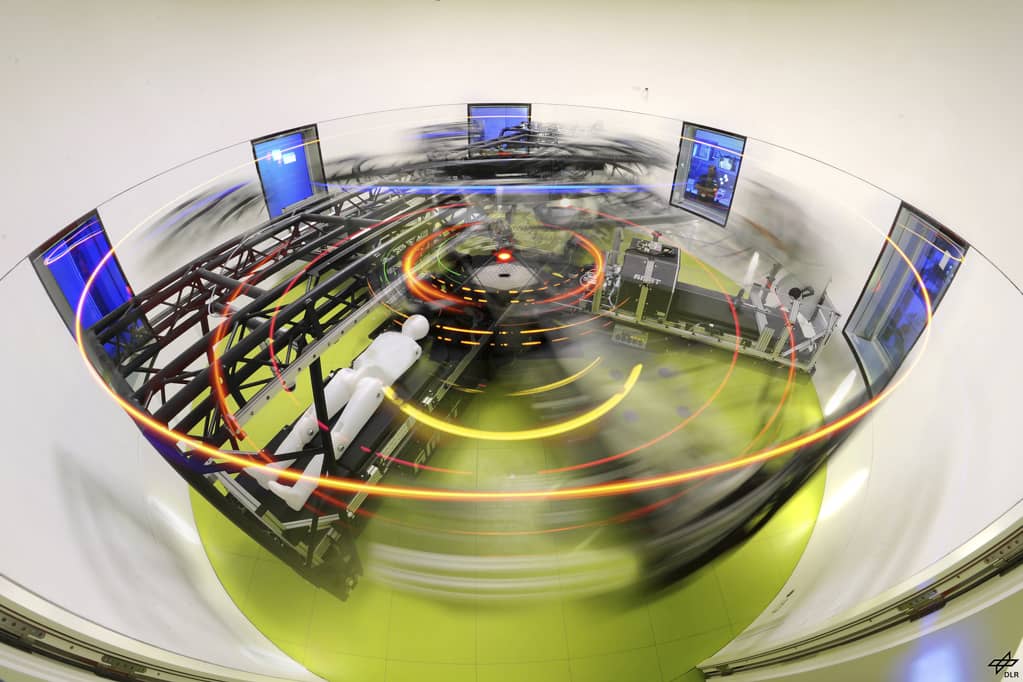

Centrifuge Hub
The centrifuge hub consists of three main assembly groups, main arm with rail guides and spindle drives, two secondary arms (detachable) with rail guides and spindle drives, a lattice arm equipped with a robotic- and a motion capturing system.